Simplexe, structure et transformations
Définition mathématique
Definition 1 (Simplexe (Aitchison 1982)) Le simplexe \(\mathcal{S}^D\) est défini comme l’ensemble des vecteurs de \(\mathbb{R}^D\) à coordonnées positives qui somment à \(1\):
\[ \CS^D = \left\{ \vect{x} = (x_1, \dots, x_D) \in \RR^D \text{ tels que } \sum_{j=1}^D x_j = 1 \text{ et } x_j > 0 \text{ pour } j=1,\dots,D \right\}. \]
Warning
- Le simplexe est parfois défini avec des inégalités larges (\(\geq\)) plutôt que strictes (\(>\)).
- Par cohérence avec les opérations définies sur le simplexe, on utilise des inégalités strictes
- En particulier, la bordure du simplexe (compositions avec une ou plusieurs composantes nulles) n’est pas inclus dans le simplexe.
Opérations dans le simplexe (II)
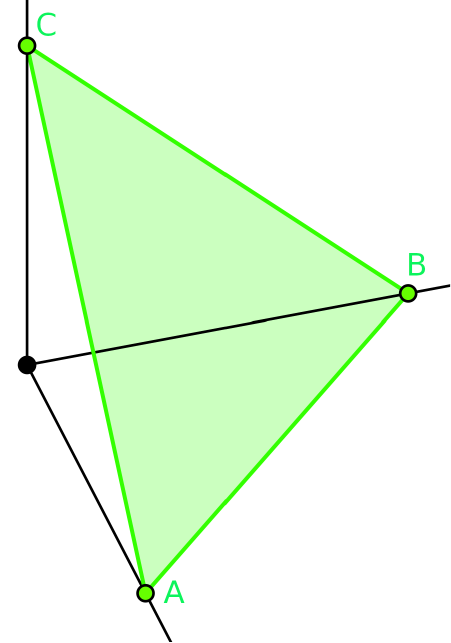
Illustrons les opérateurs \(\oplus\) et \(\odot\) avec \(\vect{a} = (0.15, 0.35, 0.5)\), \(\vect{b} = (0.35, 0.15, 0.5)\) et:
Perturbation:
\(\vect{c} = \vect{a} \oplus \vect{b}\)
Powering:
\(\vect{d} = 2 \odot \vect{a}\), \(\vect{e} = 0.5 \odot \vect{a}\) et \(\vect{f} = -2 \odot \vect{a}\)

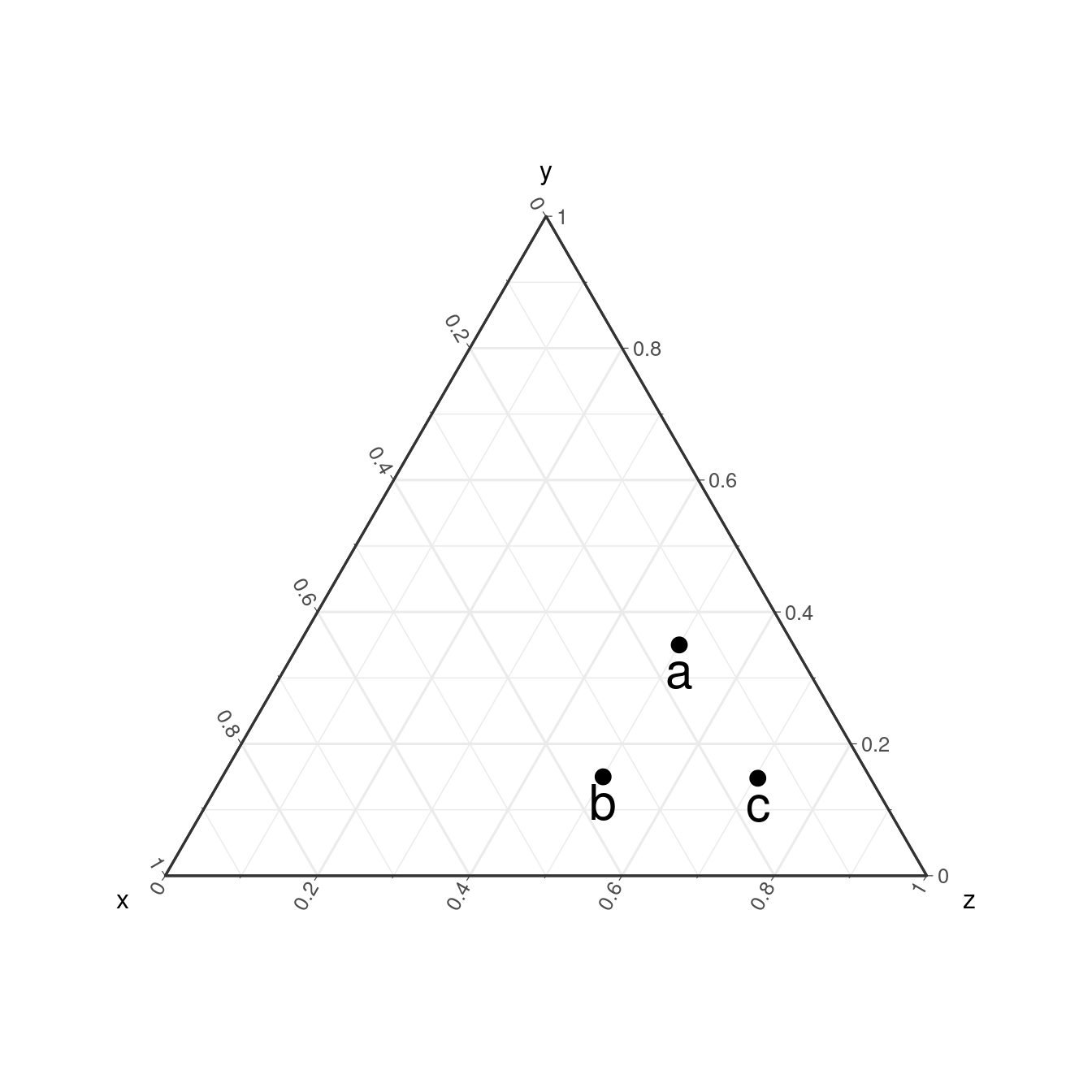
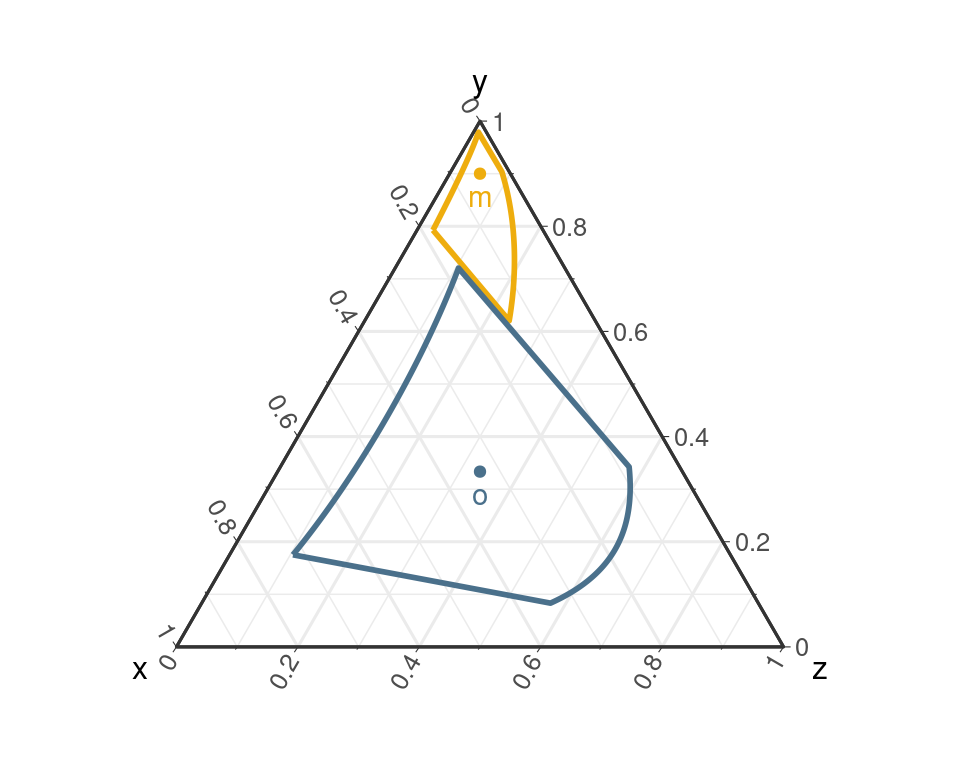
Géométrie dans le simplexe
\((\CS^D, <., .>_A)\) est un espace euclidien de dimension \(D-1\). Il dispose donc de sa propre géométrie que nous allons brièvement décrire et illustrer dans \(\CS^3\).
Definition 6 (Boule) La boule \(\mathcal{B}_R(\vect{c})\) de rayon \(R\) et de centre \(\vect{c}\) est définie par:
\[ \mathcal{B}_R(\vect{c}) = \{ \vect{x} \in \CS^D \text{ t.q.} \parallel \vect{x} \ominus \vect{c} \parallel_A \leq R\} \]
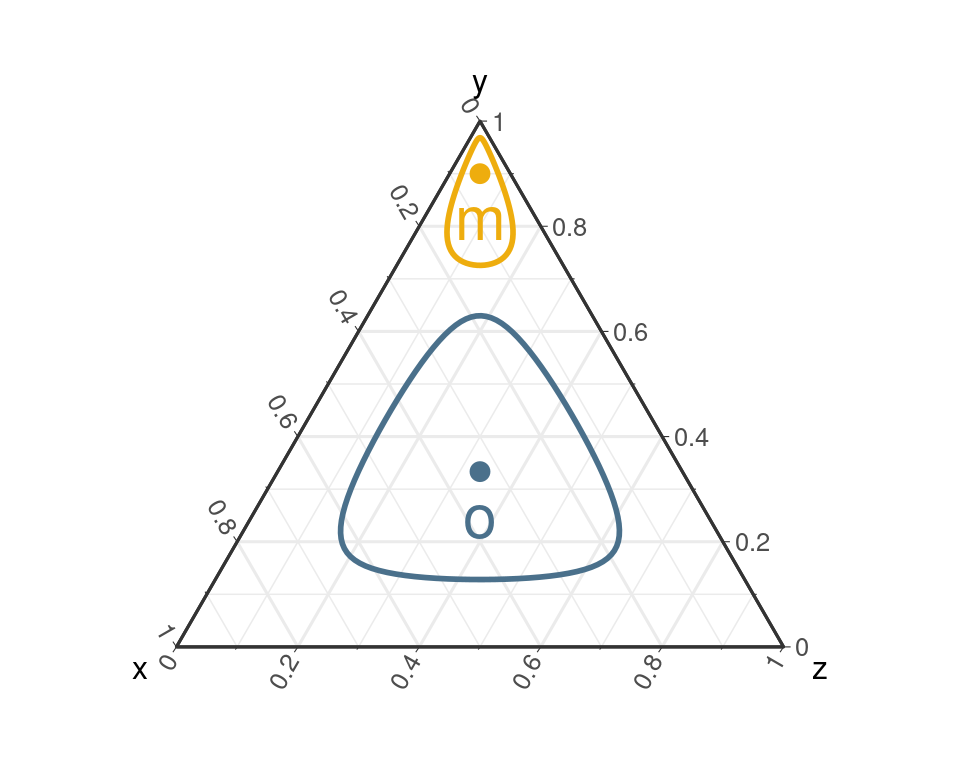
Definition 7 (Droite) La droite \(D_{\vect{a}, \vec{\vect{u}}}\) passant par \(\vect{a} \in \CS^D\) de direction \(\vect{u}\) est définie par
\[ D_{\vect{a}, \vec{\vect{u}}} = \left\{ \vect{x} \in \CS^D \text{ t.q. } \vect{x} = \vect{a} \oplus \alpha \odot \vect{u}, \alpha \in \RR \right\} \]
Droites dans le simplexe
On peut également définir des droites parallèles et orthogonales.
Definition 8 (Parallélisme)
Deux droites \(D_{\vect{a}, \vec{\vect{u}}}\) et \(D_{\vect{b}, \vec{\vect{v}}}\) sont parallèles ssi les compositions \(\vect{u}\) et \(\vect{v}\) sont colinéaires \(\Leftrightarrow \exists \alpha \in \RR, \vect{v} = \alpha \odot \vect{u}\)

Definition 9 (Orthogonalité)
Deux droites \(D_{\vect{a}, \vec{\vect{u}}}\) et \(D_{\vect{b}, \vec{\vect{v}}}\) sont orthogonales si les compositions \(\vect{u}\) et \(\vect{v}\) sont orthogonales, c’est à dire si \(<\vect{u}, \vect{v}>_A = 0\).

Autres formes
On peut également définir d’autres formes comme des carrés ou des triangles.
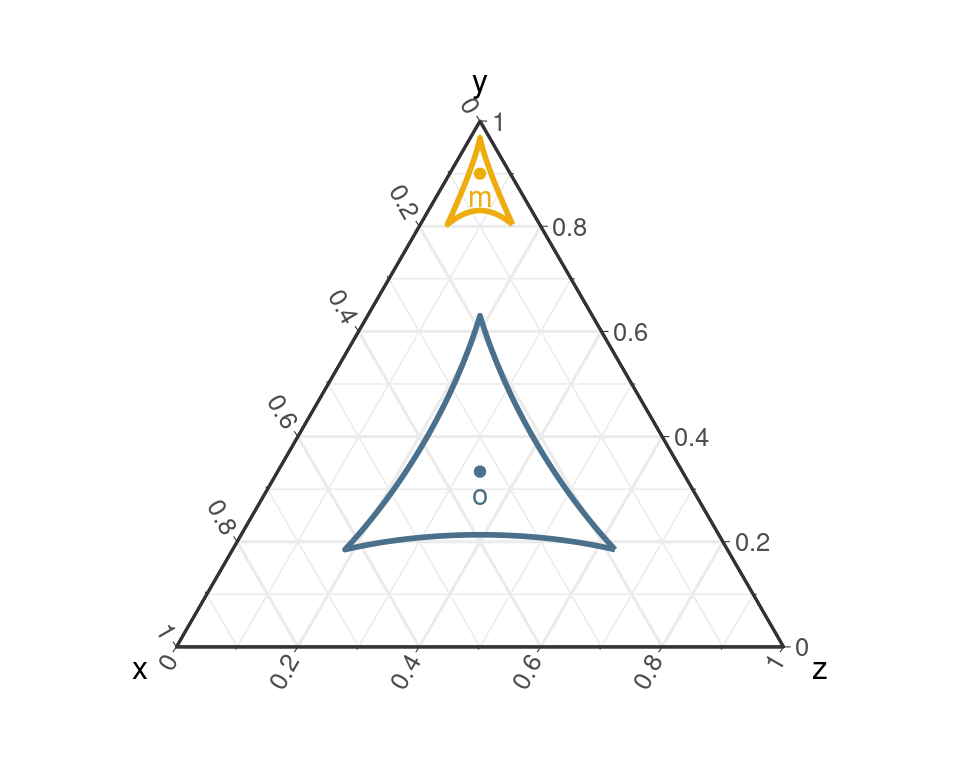
On reviendra plus tard sur la façon de définir ces objets.
La philosophie de la transformation
Géométrie du simplexe
- Géométrie contre-intuitive
- Information pertinente: ratios des composants
- Transformation \(\log\) pour symétriser les ratios
- Transformations log-ratio (xlr): \(\CS^D \leftrightarrow \RR^D\)
Philosophie de la transformation
- Transformer les compositions en vecteurs de \(\RR^D\)
- Appliquer les opérations usuelles dans \(\RR^D\)
- Transformer le résultat dans \(\CS^D\)

Aussi utilisé pour définir des formes (carrés, triangles, cercles, etc) dans \(\CS^D\)
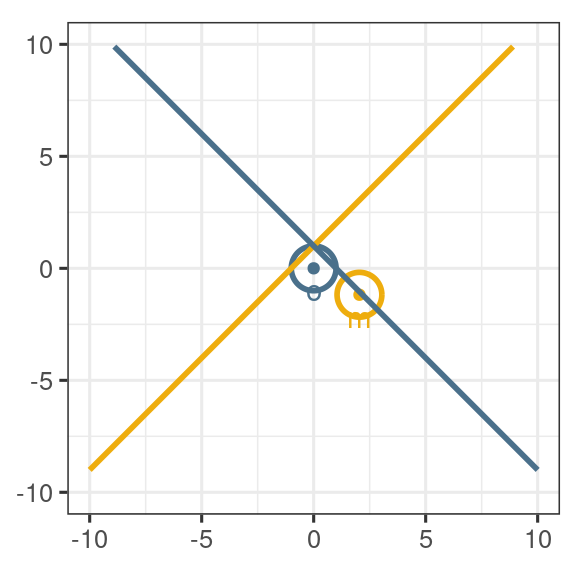
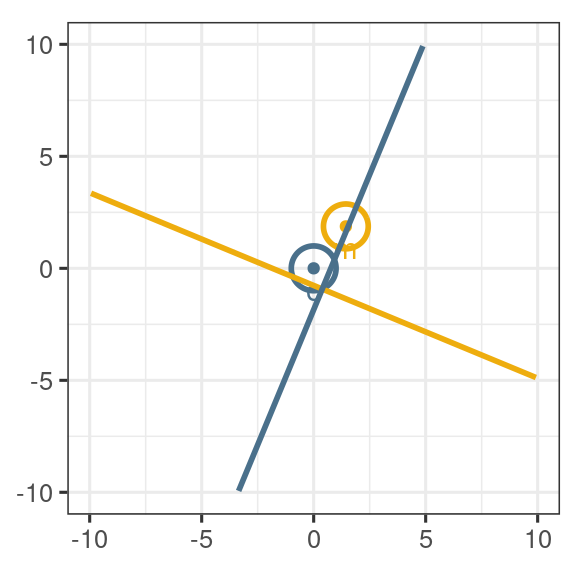
Coordonnées alr: illustrations
- Le choix de la composante de référence \(j\) est arbitraire. Pour \(\vect{x} = c(0.5, 0.3, 0.2)\):
\[ \begin{align} \alr_1(\vect{x}) & = (-0.511, 0.916) \\ \alr_2(\vect{x}) & = (0.511, -0.405) \\ \alr_3(\vect{x}) & = (0.916, 0.405) \end{align} \]
- \(\alr\) n’est pas une isométrie
\[ \| \alr_1(\vect{x}) \| > \| \alr_3(\vect{x}) \| > \| \alr_2(\vect{x}) \| > \| \vect{x} \|_A \]
- les droites ressemblent à des droites mais ni les cercles, ni les angles ne sont conservés.


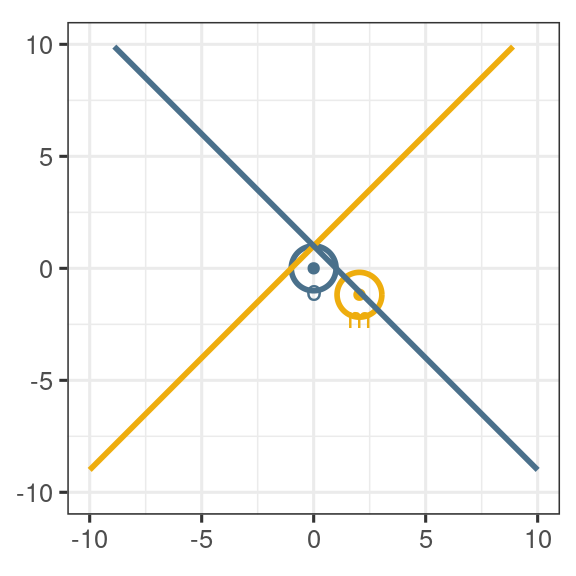
Coordonnées ilr: illustrations
- \(\vect{V}\) est une matrice de contraste: chaque vecteur \(\vect{v}_j\) vérifie \(v_{j1} + \dots + v_{jD} = 0\). Le produit scalaire \(\vect{v}_j^T \text{clr}(\vect{x})\) définit donc un contraste sur les composantes de \(\log \vect{x}\).
- On peut compléter \(\vect{V}\) pour avoir une matrice orthogonale dans \(\RR^D\)
\[ \begin{align} \vect{V}^\star & = [\vect{V}\quad \vect{1}_D/\sqrt{D}] \in \mathbb{O}_D \\ \vect{V}^T\vect{V} & = \vect{I}_{D-1} \\ \vect{V}\vect{V}^T & = \underbrace{\vect{I}_D - \vect{1}_D\vect{1}_D^T / D}_{= \vect{G}_D} \end{align} \]
- \(\ilr_V\) préserve les droites, les angles et les distances.

Coordonnées ilr: remarques
Les coordonnées \(\ilr\) sont moins interprétables que les coordonnées \(\clr\) et \(\alr\)
Les coordonnées \(\ilr\) dépendent de \(\vect{V}\) et il faut donc choisir une base pertinente.

Balances: exemples

\[ \begin{array}{l|lllll} & x_1 & x_2 & x_3 & x_4 & x_5 \\ \hline \vect{v}_1 & + & - & & & \\ \vect{v}_2 & & & & + & - \\ \vect{v}_3 & & & + & - & - \\ \vect{v}_4 & + & + & - & - & - \end{array} \]

\[ \begin{array}{l|lllll} & x_1 & x_2 & x_3 & x_4 & x_5 \\ \hline \vect{v}_1 & + & - & - & - & - \\ \vect{v}_2 & & + & - & - & - \\ \vect{v}_3 & & & + & - & - \\ \vect{v}_4 & & & & + & - \end{array} \]
Pourquoi faire ?
- Pour définir des applications entre simplexes
- Pour définir des applications entre simplexes et espaces euclidiens usuels
- Comme brique de base pour définir des lois de probabilités sur le simplexe
- Comme brique de base pour faire des méthodes d’analyse de données
Comme pour géométrie de Aitchison, les applications linéaires utilisent la philosophie de la transformation.
